容器技术
程序
操作系统从“程序”中发现输入数据保存在一个文件中,所以这些数据就会被加载到内存中待命。同时,操作系统又读取到了计算加法的指令,这时,它就需要指示 CPU 完成加法操作。而 CPU 与内存协作进行加法计算,又会使用寄存器存放数值、内存堆栈保存执行的命令和变量。同时,计算机里还有被打开的文件,以及各种各样的 I/O 设备在不断地调用中修改自己的状态。 容器技术的核心功能,就是通过约束和修改进程的动态表现,从而为其创造出一个“边界”
Namespace (隔离)
而 Namespace 的使用方式也非常有意思:它其实只是 Linux 创建新进程的一个可选参数。我们知道,在 Linux 系统中创建进程的系统调用是 clone(),比如:
int pid = clone(main_function, stack_size, SIGCHLD, NULL);
这个系统调用就会为我们创建一个新的进程,并且返回它的进程号 pid。 而当我们用 clone() 系统调用创建一个新进程时,就可以在参数中指定 CLONE_NEWPID 参数,比如:
int pid = clone(main_function, stack_size, CLONE_NEWPID | SIGCHLD, NULL);
这时,新创建的这个进程将会“看到”一个全新的进程空间,在这个进程空间里,它的 PID 是 1。之所以说“看到”,是因为这只是一个“障眼法”,在宿主机真实的进程空间里,这个进程的 PID 还是真实的数值,比如 100。
而除了我们刚刚用到的 PID Namespace,Linux 操作系统还提供了 Mount、UTS、IPC、Network 和 User 这些 Namespace,用来对各种不同的进程上下文进行“障眼法”操作。比如,Mount Namespace,用于让被隔离进程只看到当前 Namespace 里的挂载点信息;Network Namespace,用于让被隔离进程看到当前 Namespace 里的网络设备和配置。
Cgroups (限制)
Linux Cgroups 的全称是 Linux Control Group。它最主要的作用,就是限制一个进程组能够使用的资源上限,包括 CPU、内存、磁盘、网络带宽等等。 除 CPU 子系统外,Cgroups 的每一个子系统都有其独有的资源限制能力,比如:blkio,为块设备设定I/O 限制,一般用于磁盘等设备;cpuset,为进程分配单独的 CPU 核和对应的内存节点;memory,为进程设定内存使用的限制。
top 指令问题
如果在容器里执行 top 指令,就会发现,它显示的信息居然是宿主机的 CPU 和内存数据,而不是当前容器的数据。造成这个问题的原因就是,/proc 文件系统并不知道用户通过 Cgroups 给这个容器做了什么样的资源限制,即:/proc 文件系统不了解 Cgroups 限制的存在。
镜像
Mount Namespace 修改的,是容器进程对文件系统“挂载点”的认知。但是,这也就意味着,只有在“挂载”这个操作发生之后,进程的视图才会被改变。而在此之前,新创建的容器会直接继承宿主机的各个挂载点。 它对容器进程视图的改变,一定是伴随着挂载操作(mount)才能生效。
每当创建一个新容器时,我希望容器进程看到的文件系统就是一个独立的隔离环境,而不是继承自宿主机的文件系统。怎么才能做到这一点呢?
在 Linux 操作系统里,有一个名为 chroot 的命令可以帮助你在 shell 中方便地完成这个工作。顾名思义,它的作用就是帮你“change root file system”,即改变进程的根目录到你指定的位置。
这个挂载在容器根目录上、用来为容器进程提供隔离后执行环境的文件系统,就是所谓的“容器镜像”。它还有一个更为专业的名字,叫作:rootfs(根文件系统)
rootfs 只是一个操作系统所包含的文件、配置和目录,并不包括操作系统内核。在 Linux 操作系统中,这两部分是分开存放的,操作系统只有在开机启动时才会加载指定版本的内核镜像。
Docker 在镜像的设计中,引入了层(layer)的概念。也就是说,用户制作镜像的每一步操作,都会生成一个层,也就是一个增量 rootfs。
只读层 (镜像层)
它是这个容器的 rootfs 最下面的五层,对应的正是 ubuntu:latest 镜像的五层。可以看到,它们的挂载方式都是只读的
可读写层 (容器层)
它的挂载方式为:rw,即 read write。在没有写入文件之前,这个目录是空的。而一旦在容器里做了写操作,你修改产生的内容就会以增量的方式出现在这个层中。
为了实现这样的删除操作,AuFS 会在可读写层创建一个 whiteout 文件,把只读层里的文件“遮挡”起来。比如,你要删除只读层里一个名叫 foo 的文件,那么这个删除操作实际上是在可读写层创建了一个名叫.wh.foo 的文件。这样,当这两个层被联合挂载之后,foo 文件就会被.wh.foo 文件“遮挡”起来,“消失”了。这个功能,就是“ro+wh”的挂载方式,即只读 +whiteout 的含义。我喜欢把 whiteout 形象地翻译为:“白障”。所以,最上面这个可读写层的作用,就是专门用来存放你修改 rootfs 后产生的增量,无论是增、删、改,都发生在这里。而当我们使用完了这个被修改过的容器之后,还可以使用 docker commit 和 push 指令,保存这个被修改过的可读写层,并上传到 Docker Hub 上,供其他人使用;而与此同时,原先的只读层里的内容则不会有任何变化。这,就是增量 rootfs 的好处。
Init 层
夹在只读层和读写层之间。Init 层是 Docker 项目单独生成的一个内部层,专门用来存放 /etc/hosts、/etc/resolv.conf 等信息。需要这样一层的原因是,这些文件本来属于只读的 Ubuntu 镜像的一部分,但是用户往往需要在启动容器时写入一些指定的值比如 hostname,所以就需要在可读写层对它们进行修改。可是,这些修改往往只对当前的容器有效,我们并不希望执行 docker commit 时,把这些信息连同可读写层一起提交掉。所以,Docker 做法是,在修改了这些文件之后,以一个单独的层挂载了出来。而用户执行 docker commit 只会提交可读写层,所以是不包含这些内容的。
copy-on-write
所有的增删查改操作都只会作用在容器层,相同的文件上层会覆盖掉下层。知道这一点,就不难理解镜像文件的修改,比如修改一个文件的时候,首先会从上到下查找有没有这个文件,找到,就复制到容器层中,修改,修改的结果就会作用到下层的文件
Dockerfile
Dockerfile 的设计思想,是使用一些标准的原语(即大写高亮的词语),描述我们所要构建的 Docker 镜像。并且这些原语,都是按顺序处理的。
Dockerfile 中的每个原语执行后,都会生成一个对应的镜像层。
容器
容器是一个“单进程”模型。
一个正在运行的 Docker 容器,其实就是一个启用了多个 Linux Namespace 的应用进程,而这个进程能够使用的资源量,则受 Cgroups 配置的限制。
对 Docker 项目来说,它最核心的原理实际上就是为待创建的用户进程:启用 Linux Namespace 配置;设置指定的 Cgroups 参数;切换进程的根目录(Change Root)。
docker exec
一个进程的每种 Linux Namespace,都在它对应的 /proc/[进程号]/ns 下有一个对应的虚拟文件,并且链接到一个真实的 Namespace 文件上。有了这样一个可以“hold 住”所有 Linux Namespace 的文件,我们就可以对 Namespace 做一些很有意义事情了,比如:加入到一个已经存在的 Namespace 当中。
一个进程,可以选择加入到某个进程已有的 Namespace 当中,从而达到“进入”这个进程所在容器的目的,这正是 docker exec 的实现原理。
#define _GNU_SOURCE
#include <fcntl.h>
#include <sched.h>
#include <unistd.h>
#include <stdlib.h>
#include <stdio.h>
#define errExit(msg) do { perror(msg); exit(EXIT_FAILURE);} while (0)
int main(int argc, char *argv[]) {
int fd;
fd = open(argv[1], O_RDONLY);
if (setns(fd, 0) == -1) {
errExit("setns");
}
execvp(argv[2], &argv[2]);
errExit("execvp");
}
这段代码的核心操作,则是通过 open() 系统调用打开了指定的 Namespace 文件,并把这个文件的描述符 fd 交给 setns() 使用。在 setns() 执行后,当前进程就加入了这个文件对应的 Linux Namespace 当中了。
docker commit
docker commit,实际上就是在容器运行起来后,把最上层的“可读写层”,加上原先容器镜像的只读层,打包组成了一个新的镜像。当然,下面这些只读层在宿主机上是共享的,不会占用额外的空间。而由于使用了联合文件系统,你在容器里对镜像 rootfs 所做的任何修改,都会被操作系统先复制到这个可读写层,然后再修改。这就是所谓的:Copy-on-Write。而正如前所说,Init 层的存在,就是为了避免你执行 docker commit 时,把 Docker 自己对 /etc/hosts 等文件做的修改,也一起提交掉。
Volume
允许你将宿主机上指定的目录或者文件,挂载到容器里面进行读取和修改操作。
我们只需要在 rootfs 准备好之后,在执行 chroot 之前,把 Volume 指定的宿主机目录(比如 /home 目录),挂载到指定的容器目录(比如 /test 目录)在宿主机上对应的目录(即 /var/lib/docker/aufs/mnt/[可读写层 ID]/test)上,这个 Volume 的挂载工作就完成了。
就是 Linux 的绑定挂载(bind mount)机制。它的主要作用就是,允许你将一个目录或者文件,而不是整个设备,挂载到一个指定的目录上。并且,这时你在该挂载点上进行的任何操作,只是发生在被挂载的目录或者文件上,而原挂载点的内容则会被隐藏起来且不受影响。
全景图
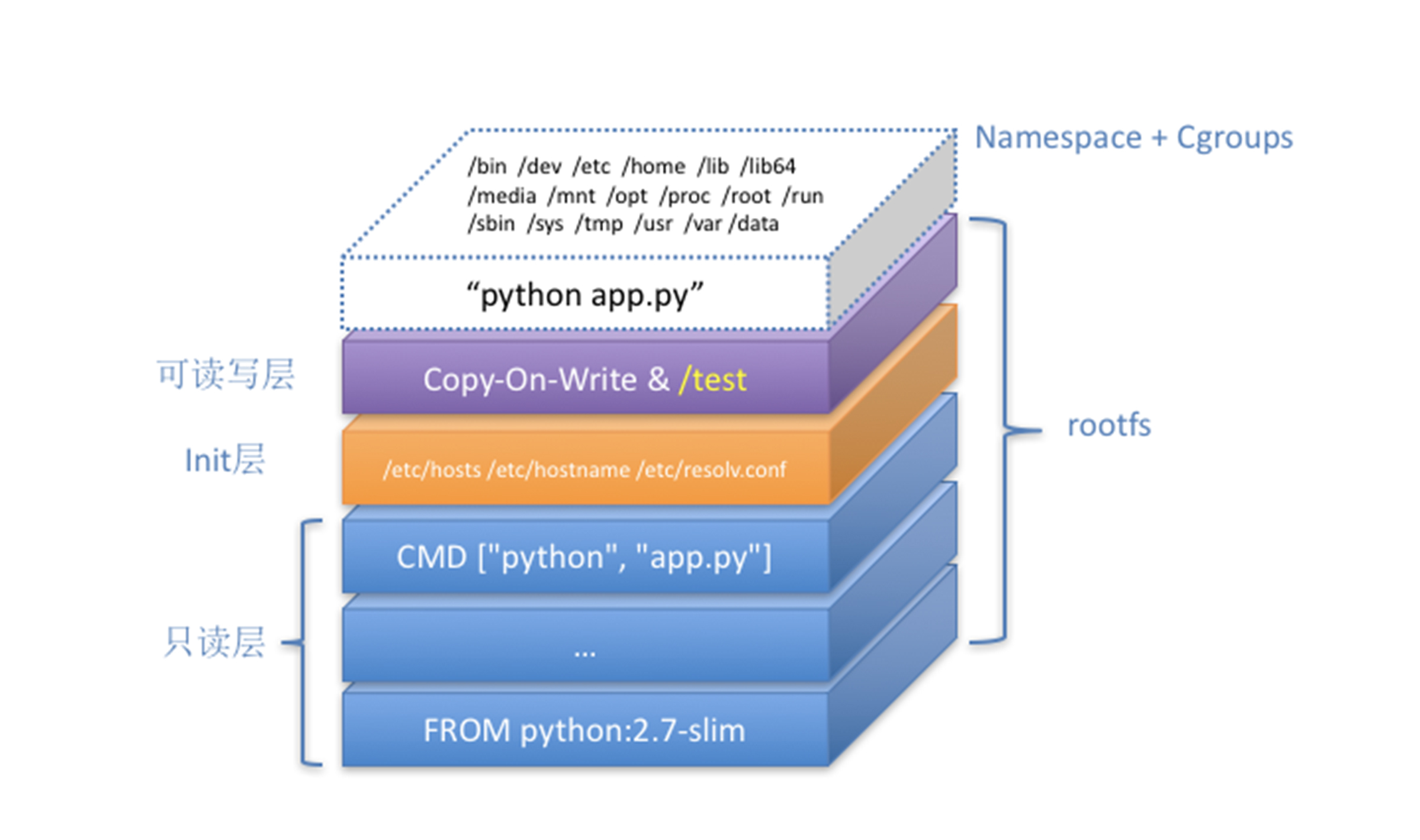
这个容器进程“python app.py”,运行在由 Linux Namespace 和 Cgroups 构成的隔离环境里;而它运行所需要的各种文件,比如 python,app.py,以及整个操作系统文件,则由多个联合挂载在一起的 rootfs 层提供。这些 rootfs 层的最下层,是来自 Docker 镜像的只读层。
在只读层之上,是 Docker 自己添加的 Init 层,用来存放被临时修改过的 /etc/hosts 等文件。
而 rootfs 的最上层是一个可读写层,它以 Copy-on-Write 的方式存放任何对只读层的修改,容器声明的 Volume 的挂载点,也出现在这一层。
k8s
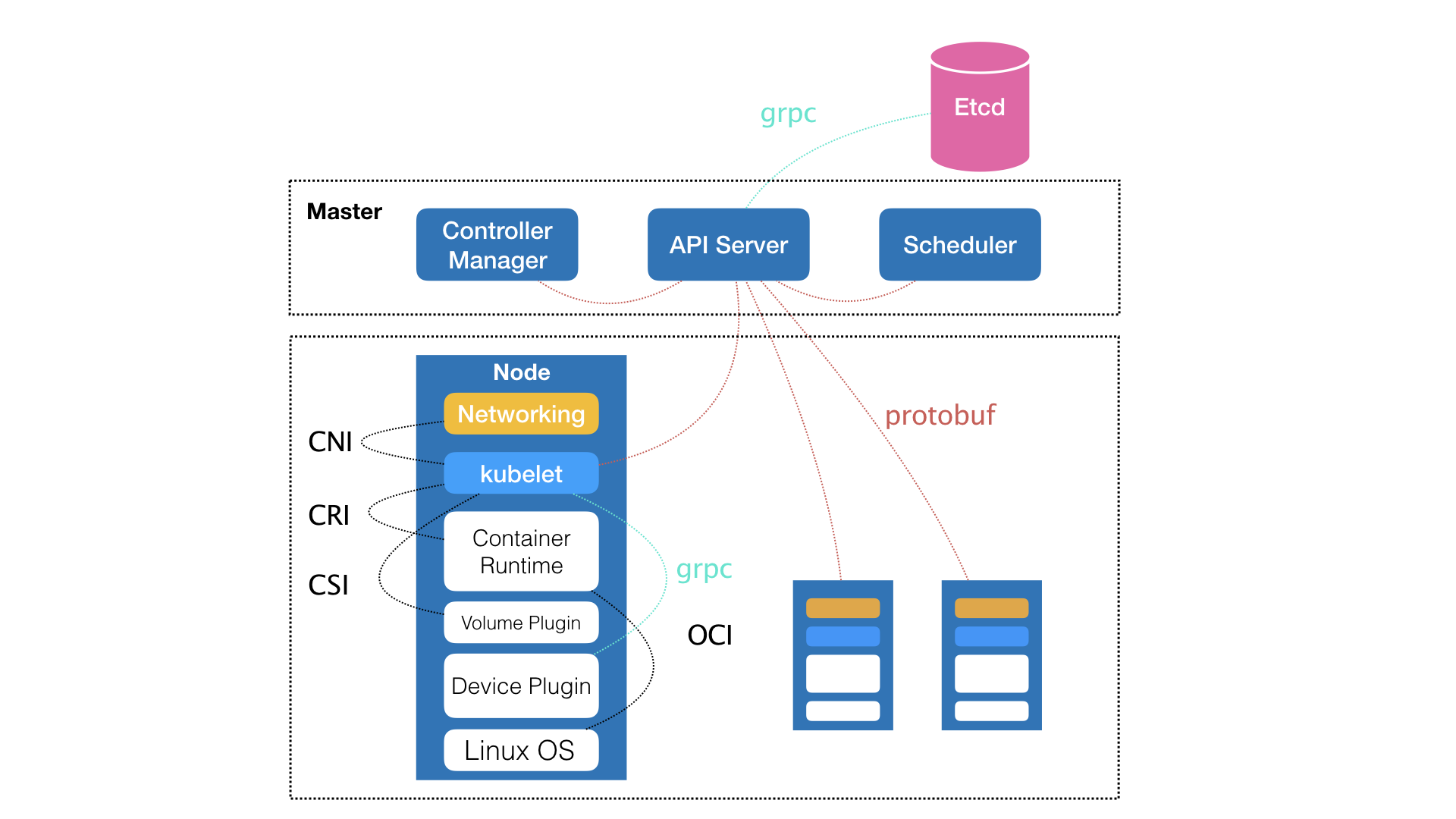
控制节点,即 Master 节点,由三个紧密协作的独立组件组合而成,它们分别是负责 API 服务的 kube-apiserver、负责调度的 kube-scheduler,以及负责容器编排的 kube-controller-manager。整个集群的持久化数据,则由 kube-apiserver 处理后保存在 Etcd 中。而计算节点上最核心的部分,则是一个叫作 kubelet 的组件。
在 Kubernetes 项目中,kubelet 主要负责同容器运行时(比如 Docker 项目)打交道。而这个交互所依赖的,是一个称作 CRI(Container Runtime Interface)的远程调用接口,这个接口定义了容器运行时的各项核心操作,比如:启动一个容器需要的所有参数。
Kubernetes的核心设计理念是基于声明式API,通过定义“编排对象”和“服务对象”来实现平台级功能。使用Kubernetes启动容器化任务非常简便,只需编写一个YAML文件,定义Deployment对象并指定副本数,即可启动容器副本。这种声明式API带来了诸多好处,以及基于其实现的强大编排能力,使Kubernetes成为当今基础设施领域的重要工具。
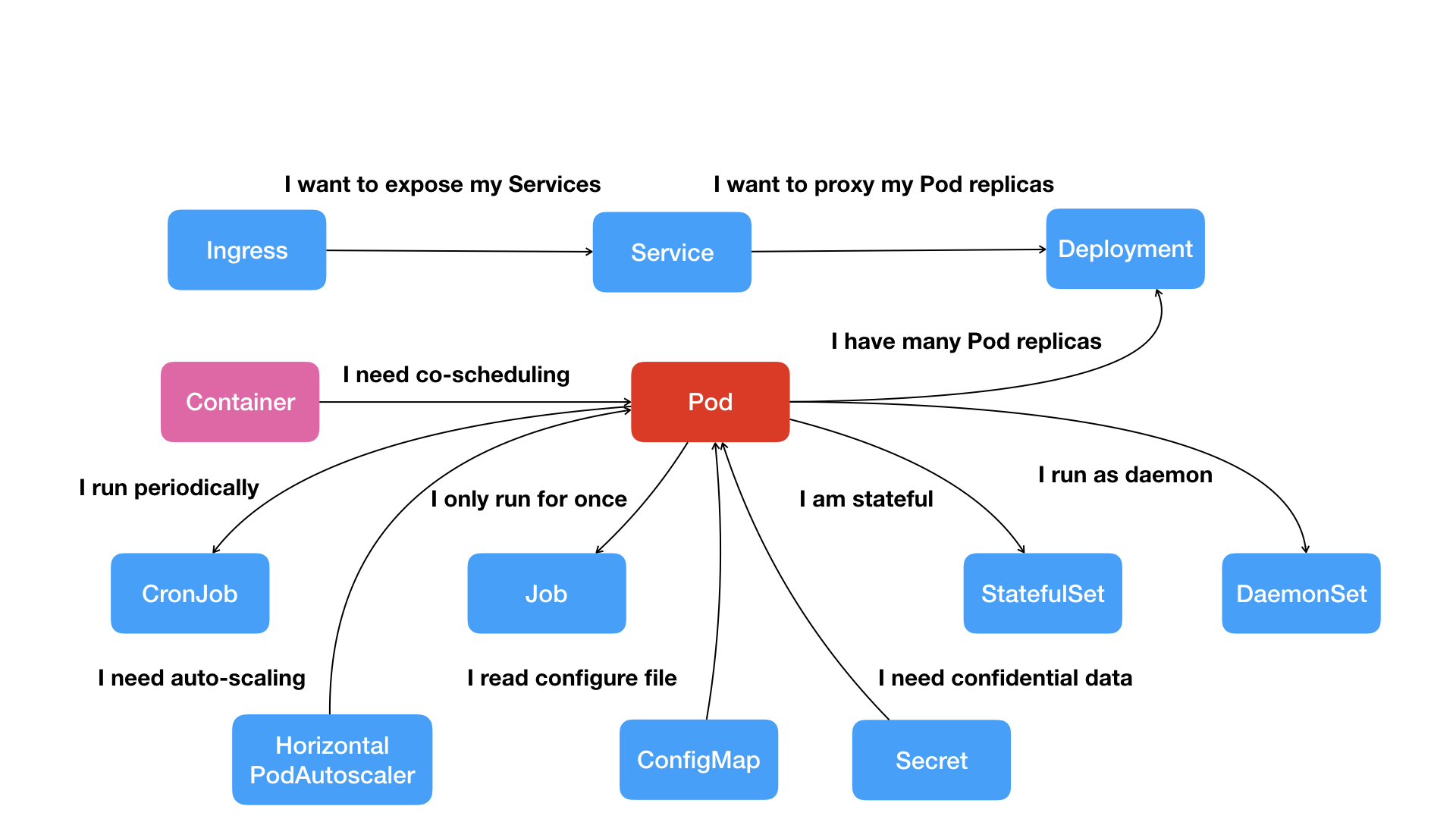
Pod
有些应用之间需要非常频繁的交互和访问;又或者,它们会直接通过本地文件进行信息交换。
在常规环境下,这些应用往往会被直接部署在同一台机器上,通过 Localhost 通信,通过本地磁盘目录交换文件。而在 Kubernetes 项目中,这些容器则会被划分为一个“Pod”,Pod 里的容器共享同一个 Network Namespace、同一组数据卷,从而达到高效率交换信息的目的。
Service
对于一个容器来说,它的 IP 地址等信息不是固定的,那么 Web 应用又怎么找到数据库容器的 Pod 呢?
Kubernetes 项目的做法是给 Pod 绑定一个 Service 服务,而 Service 服务声明的 IP 地址等信息是“终生不变”的。这个 Service 服务的主要作用,就是作为 Pod 的代理入口(Portal),从而代替 Pod 对外暴露一个固定的网络地址。这样,对于 Web 应用的 Pod 来说,它需要关心的就是数据库 Pod 的 Service 信息。不难想象,Service 后端真正代理的 Pod 的 IP 地址、端口等信息的自动更新、维护,则是 Kubernetes 项目的职责。
Deployment
有了 Pod 之后,我们希望能一次启动多个应用的实例,这样就需要 Deployment 这个 Pod 的多实例管理器